by  ZJ
ZJ
本文檔描述了GNSS常見的坐標系、術語及其轉換方法。
下列術語和定義適用于本文件。
2.1 地球橢球earth ellipsoid
近似表示地球的形狀和大小,并且其表面為等位面的旋轉橢球。
2.2 參考橢球reference ellipsoid
最符合一定區域的大地水準面,具有一定大小和定位參數的旋轉地球橢球。
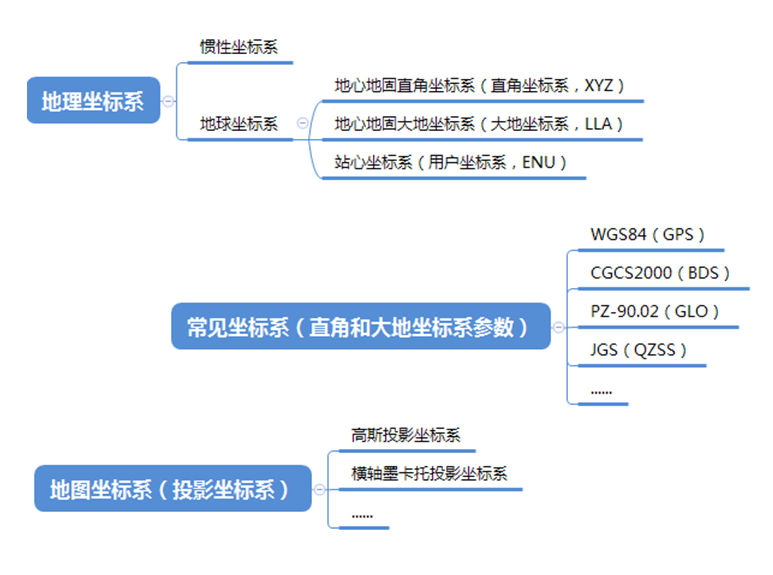
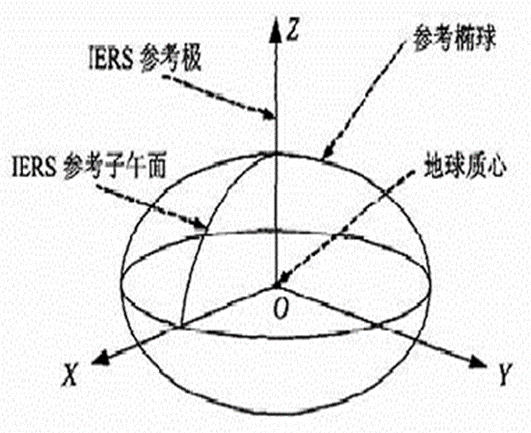
2.3 地心地固坐標系(空間直角坐標系)ECEF
空間直角坐標系,其xy平面與地球赤道面重合,x軸指向0°經度方向,y軸指向東經90°方向,z軸為與赤道平面垂直指向地理北極,構成右手坐標系。xyz軸隨著地球一起旋轉,在慣性空間中不再描述固定的方向。
2.4 大地坐標系 geodetic coordinate system
以地球橢球中心為原點、起始子午面和赤道面為基準面的地球坐標系。由于地球的形狀不規則,在GPS/北斗中使用一個標準橢球體來近似描述,這樣可以方便計算接收機的經度、緯度和高度。橢球體可以用兩個參數來表示,長半軸和扁率,其他參數如短半軸、偏心率、第二偏心率等都可以由這兩個參數導出。
2.5 橢球高/海拔高/大地水準面高(高程異常) ellipsoid/orthometric/geoid height
橙色曲線為參考橢球面,綠色曲線為地表(或GPS天線位置),h為橢球高,GPS定位解算結果(ECEF)在WGS84橢球下可轉換為經緯度和橢球高h。藍色曲線為大地水準面Geoid,對應于最小二乘下的全球平均海平面(Mean Sea Level),恒重力勢平面,由于地球密度分布不均,各地的重力勢存在差異,因而大地水準面不是規則的曲面。相對于大地水準面的高度H稱為海拔高(orthometric height),或者平均海平面高(MSL)。大地水準面的高度N是大地水準面相對于橢球面的高度,也稱高程異常。橢球高h、海拔高H和高程異常N三者之間的關系為h=H+N。參考橢球確定了之后,各個地區的高程異常N也是確定的,寫在geoid.bin文件中。
2.6 站心坐標系(東北天坐標系)
站心坐標系也叫東北天坐標系ENU,用于表示以觀察者為中心的其他物體的運動規律。以站心為坐標系原點,z軸與橢球法線重合,向上為正,y與橢球短半軸重合(北向),x軸與橢球長半軸重合(東向)。
2.7 高斯投影 Gauss projection
由于地球是球體,為了在地圖上表示,將橢球面沿子午線劃分成若干個經差相等的狹窄地帶,然后各帶分別投影到平面上。一般以赤道上某一經度的點為原點,計算投影后的坐標,為了使投影后的坐標為正數,通常在橫軸加500km的常數。
2.8 坐標轉換 coolrdinate transformation
包含坐標系變換和橢球基準變換兩層含義。在測量數據處理過程中,采用適用的轉換模型和轉換方法,空間點從某一參考橢球基準下的坐標轉換到另一坐標系統下的坐標,如WGS84轉為北京54。坐標轉換過程就是轉換參數的求解過程。
2.9 坐標系變換 coordinate conversion
同一橢球基準下,空間點的不同坐標表示形式間進行變換。包括大地坐標系和空間直角坐標系的互相轉換、空間直角坐標系與站心坐標系間的轉換和高斯投影坐標正反算。
2.10 橢球變換 ellipsoid conversion
空間點在不同的參考橢球間的坐標變換。
2.11 平移參數 translation parameters
兩坐標系轉換時,新坐標系原點在原坐標系中的坐標分量。
2.12 旋轉參數 rotation parameters
兩坐標系轉換時,把原坐標系中的各坐標軸左旋轉到與新坐標系相應的坐標軸重合或平行時坐標系各軸依次轉過的角度。
3.1 慣性坐標系與地球坐標系
慣性坐標系(或空固坐標系)在空間靜止或勻速直線運動的坐標系。實際操作中很難建立慣性坐標系,方便用于天文學中對于描述星系中的衛星運行軌道。
地球坐標系(或地固坐標系)是固定在地球上而隨地球一起在空間做自轉和公轉運動的坐標系。
3.2 常用地球坐標系類型
建立地球坐標系需要確定的地理基準,如直角坐標系中的赤道、北極,大地坐標系的地球橢球模型。地球的北極點并不是固定不變的,地球的形狀也不是完整的橢球,所以基于不同時間段不同測量方式確定的各國的坐標系參數會有微小的偏差。各國坐標系參數可在國家測繪局或宇航局的公開文件中查詢。而常用的地球坐標系種類有以下幾種:
3.2.1 直角坐標系(ECEF)
地心地固直角坐標系構建方式:
以地心作為坐標原點;
Z軸指向地球北極點;
X軸指向參考子午面(英國倫敦格林尼治子午面)與赤道的一個交點;
X、Y、Z三軸構成右手直角坐標系。
受地球自轉和公轉的影響,地球南北兩極點并不是固定的;而不同測繪組織測量的地球南北兩極點也存在位置偏差。按照不同時期或不同組織發布的地球極點位置建立的地心地固直角坐標系框架一致,但有微小的偏差。如GPS-ICD文件中說明GPS的直角坐標系是以IERS(國際地球自轉服務組織)WGS84橢球體對應的地級為基準的;如BDS-ICD文件中說明BDS的直角坐標系是以IERS(國際地球自轉服務組織)定義的地級為基準的;兩者定義的直角坐標系,框架一致,但有微小的偏差。
3.2.2 大地坐標系(LLA)
首先需要先建立與地球表面最吻合的地球基準面,要求是以地球質心為原點建立一個與地球水準面(假想海平面)之間的高度差的平方和最小的基準橢球體。由于測量或建模方式的不同,不同國家或地區建立的地心地固大地坐標系之間框架一致,但橢球參數有微小的偏差。
建立地球基準面后,
定義大地緯度(簡稱緯度)是所在位置的基準橢球面法線與赤道面之間的夾角,赤道以北為正,赤道以南為負;
定義大地經度(簡稱經度)是所在位置的子午面與參考子午面的夾角,參考子午面以東為正,參考子午面以西為負;
定義大地高度(簡稱大地高)是所在位置到基準托球面法線的距離。查看3.5大地高/海拔高/高程異常值。
3.2.3 站心坐標系(ENU)
站心坐標系(或用戶坐標系或東北天坐標系)是以用戶所在位置為坐標原點,坐標軸分別垂直的指向東向、北向和天向的坐標系。可通過平移和旋轉變換成地心直角坐標系。
3.2.4 特殊站心坐標系——組合導航載體坐標系
載體坐標系(body frame),又稱為運動載體坐標系,由導航中要解算的導航對象的原點和姿態確定。載體坐標系的原點即為導航結果所描述的對象,坐標軸卻與載體固聯。
常用的整機坐標系(Body)和車體坐標系(Vehicle)都可理解為載體坐標系的一種,因定義或應用場景的不同而有所差別,在此主要介紹我們目前常用的定義。
通常定義Y軸為前向(即正常航行的前進方向),Z軸為天向(即向下方向),X軸為右向,并由三個坐標軸組成正交坐標系。對于角運動來說,載體坐標系的軸也被稱為滾動、俯仰和偏航軸,其中Y軸方向為滾動軸,X軸方向為俯仰軸,而Z軸方向為偏航軸,均符合右手螺旋法則規定。

